This was our first test video.
Thursday, 9 March 2017
Week 5 - 3/3/2017
Just to confirm at the beginning of the
session the individual circuits were tested separately and as a whole as we
didn’t need any more issues to arise at this point in the proceedings. After
confirming that they each work, the circuits were then connected to the Arduino
board and ultrasonic sensor.
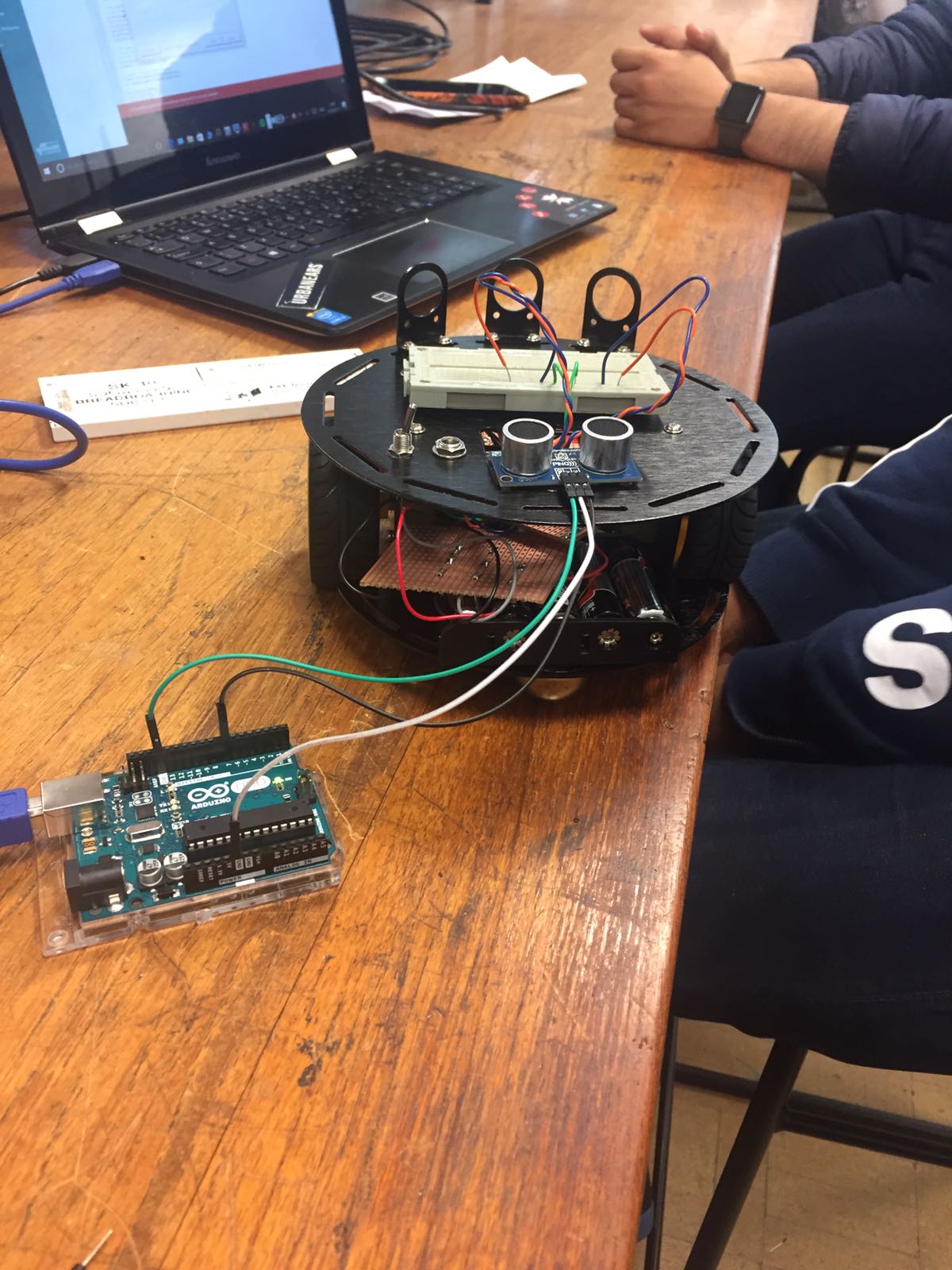
The Ultrasonic sensor was attached to the Mobile
platform using a smaller breadboard that can just sit at top of the mobile
platform. This is then connected to the Arduino which we have been able to
re-wire so that it takes its power source from the batteries rather than having
it plugged in to the main power or a laptop.
For the Arduino to control the robotic
car, two separate programs were written, the first for the line sensor and
motor drive circuit, therefore knowing which way the wheels were going to turn
depending on which way the path was going, which is what the sensors will relay
the information back to the Arduino to complete the loop of the program. The
second program is for the ultrasonic sensor circuit, this sensor is going to
continuously take measurements of the path in front of the car, then when these
measurements get to a certain distance that still gives us a turning circle
distance for the car before reaching to object that is blocking the path.
The 2 programs were tested on the Arduino board and
each worked as expected, therefore our project is nearing completion. It was
now time to fully connect everything and ensure that it works when placed on a
path.

We tried to combine the 2 program together to get
the final program. The combined program didn’t work in the way in which we
expected. The robot is meant to:
-follow a line
-stop if it finds an obstacle less than 25cm away
on the track
-move when the obstacle is removed
(possible extension is for the robot to then rotate
until it finds a new track, without an obstacle, to follow)
With the combined program the robot can
follow a line but doesn’t respond to an object in front of it. Which is not
what we thought we had programmed the Arduino to react to. This is more than
likely to do with an error within the code and should easily be rectified
before the bench inspection in a weeks’ time.
During a discussion we had a concern that may be an
issue within how the RC is programed in its basic electronics; the robot might
appear to follow a black line but actually avoids it, the line sensor gives
logic 1 on a white surface and logic 0 on a black surface so when on a black
surface, it moves in a direction to avoid it, we might have issues with tight
bends on the track, meaning if it goes off track it will continue moving.
Also we decided on a final track circuit for the
car to follow. We wanted to ensure that there would be turns and options for
the car, due to the current standings of the car not re-routing we have chosen
to design a single lane track but this could change if we can fix the coding of
the Arduino.

Week 4 - 24/3/2017
At this point the line sensor circuit,
motor drive circuit and ultrasonic sensor setup were completed, and they were
tested again in this lab session to ensure there was no loose wires or connections.
The test showed that there were problems with the line sensor and motor
drive circuit.
-Line
sensor circuit
 Our line sensor circuit consisted of an LED/LDR
connected to comparator circuit along with a potentiometer, providing a
reference voltage. The main issue was that the voltage across the LDR did not
change with light intensity. The voltage across the LDR was the same as the
reference voltage. Changing the resistance did not change the voltage applied
to the comparator circuit.
Our line sensor circuit consisted of an LED/LDR
connected to comparator circuit along with a potentiometer, providing a
reference voltage. The main issue was that the voltage across the LDR did not
change with light intensity. The voltage across the LDR was the same as the
reference voltage. Changing the resistance did not change the voltage applied
to the comparator circuit.
Our approach to solving this problem was to check
each component of the circuit and find out where the problem was. What was
thought to be the initial cause of the problem was the LDR, the LDR were tested
outside of the circuit and it was shown to change resistance with the light
intensity. The potentiometer was then tested, we turned the dial while
measuring the reference voltage, and saw no change in the voltage applied to
the comparator, but a change in the voltage at the terminal of the
potentiometer. It was later thought that there was a short circuit within the Vero
board. The circuit was eventually re-built again.

-Motor drive circuit.
In the motor drive circuit, we used a dual H bridge
which should allow us to rotate the motors in either direction. However, in our
test the motors could only turn in one direction. Any attempt at rotating in
other direction lead to the IC chip heating up. Other problem was that
the right motor would not respond to any input voltage at any polarity or would
randomly move without an input voltage applied.
After many attempts at trying to understand the
problem, the IC chip has been thought to be damaged. The dual h-bridge was
replaced and the motor drive circuit worked in the way it was expected to.

This lab session was used mainly to find/ fix the problems with both the circuits. These two circuits were separately
tested and also connected together again to be tested as well as more tests
completed on individual components using the Multimeter and power supply. Once the
circuit were working as an expected they were all connected back together again
and fixed onto the mobile platform.
Week 3 - 17/2/2017
This week we concentrated on the motor drive circuit, this
consisted of the missing chip that we ordered last week and then figuring out
what voltage would be supplied from the batteries as well as what was actually
need to power the motors without blowing any of the other components.
The motor drive circuit was quite simple
to connect together when we found out what the input voltage from the batteries
and each which set up the motors needed.


We also connected the switch into the circuit, from the
battery with proper connections. After
understanding how the switch works and how we could connect it to our circuitry,
we then connected it to the battery holder. Essentially, we can now switch on/
off the supply from the battery holder to the remaining circuits, this
therefore giving us more control over the use of the RC.

As discussed in the
previous group meetings, we figured out how to connect the 3-pinn ultrasonic
sensor to the Arduino. We then ran some program on the Arduino and tested out
the ultrasonic sensor circuit.
 With the sensor circuit, motor
drive circuit and ultrasonic sensor completed. All the different circuits were
connected to the battery supply and the toggle switch was implemented into the
design.
With the sensor circuit, motor
drive circuit and ultrasonic sensor completed. All the different circuits were
connected to the battery supply and the toggle switch was implemented into the
design.
After connecting all the circuit
to the battery supply, the different circuit were tested again to make sure
that they were still working and were properly connected to the toggle switch.
Note that the Arduino is connected to an independent power supply and so was
not connected to the battery supply.
Week 2 - 10/3/2017
This week we had a group meeting to discuss how to adjust
the sensor circuit and collate any research we had independently sought out. We
found a slight change in the variable resistor to be the issue as well as mess
spot of soldering, and so we re-tested the circuit on the breadboard and then
transferred to a Vero board. This time having a slower and more accurate
approach to the technique proved successful and so after running the
approximated voltages through the circuit using the Multi-meter we moved on to
the next task.
Below showing the
first and second successful attempt at the sensor circuit:

Sensor circuit attempt 1

Sensor
circuit attempt 2
One of the main aims for our project to achieve is to be
able to read a distance of an obstacle in front of the robot car and for the
car to react to this and adjust its path to avoid the obstacle. To do this we
are going to use a 3-pin Ultrasonic sensor. This circuit will be very simply 3
wires coming from the sensor to plug into a small breadboard and then connected
to the Arduino at a later date. These 3 wires will
be:

- · Connected to ground
- Connected to a signal source
- Connected to a 5v source
As we discussed last week we
tested the toggle switch, which came with the mobile platform, using a power
supply and Multimeter, to see if the was a valuable extra. After understanding
how the switch works and how we could connect it to our circuitry, we then connected
it to the battery holder. Essentially we can now switch on/ off the supply from
the battery holder to the remaining circuits, this therefore giving us more
control over the use of the RC.
Problems and issues:
In an attempt at starting the motor drive circuit,
we realised that the IC chip required for the motor drive circuit was not ordered.
The lack of the IC chip, LM293 dual h bridge, is not an issue but has caused a
slight delay on the building and testing of the motor drive circuit.

This chip allows us to control each motor separately
allowing for the robot car to move in different directions including backwards.
Hopefully when we test it and investigate what we can do with this chip we will
be able to use it to its full ability and progress our design to the next
level.
Week 1 - 3/2/2017
This 2nd year
project is a line following robot with a micro-controller. This is based of
first’s year project an builds up on it by adding in a micro-controller so that
the control of this project is much more efficient and this allows the
robot to be more adaptable by responding differently when moving of
track. Example would be the addition of the ultrasonic sensor module. The
Arduino controls the remaining systems. We would have 2 inputs going into the
Arduino which is the sensor circuit and the ultrasonic sensor circuit.
Fortunately
for our group all of the parts arrived on time so we could begin work immediately
on the project. We started with building the robotic platform and decided on
the following deign base:

Whilst we had an initial design for the sensor circuit,
which was comprised of a LED and LDR pair with a
comparator acting as logic circuit. The voltage from the LDR varied with
different light intensity as expected, and so when on a white background the
sensors will acknowledge this and with being connected to the motor drive
circuit will set the wheels in motion. When the sensors read the black
background the motors and therefore wheels will stop. But in our first attempt
at combining the sensor circuit the difference between the voltage obtained on
a white and black surface were not very large. This made setting the reference
voltage difficult which would be needed to ensure the path is taken too
properly and followed for the whole track. This problem was later solved
somewhat towards the end of the lab session, as we re-tested the circuit and
adjust the layout (tested on a breadboard) but throughout the next week we
conducted some independent research, to help us carry out a more effective
sensor circuit.

Furthermore we have made a slight change in the approach to building the line
following robot by swapping the micro-controller from a programmable IC chip to
an Arduino as it made integrating the Ultrasonic sensor circuit into the line
following robot much easier.
Subscribe to:
Comments (Atom)